2022 IEEE International Conference on Robotics and Automation (ICRA)
Abstract. Soft robots have drawn great interest due to their ability to take on a rich range of shapes and motions, compared to traditional rigid robots. However, the motions, and underlying statics and dynamics, pose significant challenges to forming well-generalized and robust models necessary for robot design and control. In this work, we demonstrate a five-actuator soft robot capable of complex motions and develop a scalable simulation framework that reliably predicts robot motions. The simulation framework is validated by comparing its predictions to experimental results, based on a robot constructed from piezoelectric layers bonded to a steel-foil substrate. The simulation framework exploits the physics engine PyBullet, and employs discrete rigid-link elements connected by motors to model the actuators. We perform static and AC analyses to validate a single-unit actuator cantilever setup and observe close agreement between simulation and experiments for both the cases. The analyses are extended to the five-actuator robot, where simulations accurately predict the static and AC robot motions, including shapes for applied DC voltage inputs, nearly-static "inchworm" motion, and jumping (in vertical as well as vertical and horizontal directions). These motions exhibit complex non-linear behavior, with forward robot motion reaching ~1 cm/s.
Single actuator cantilever oscillations
Robot in-place jumping
Rightward moving while jumping
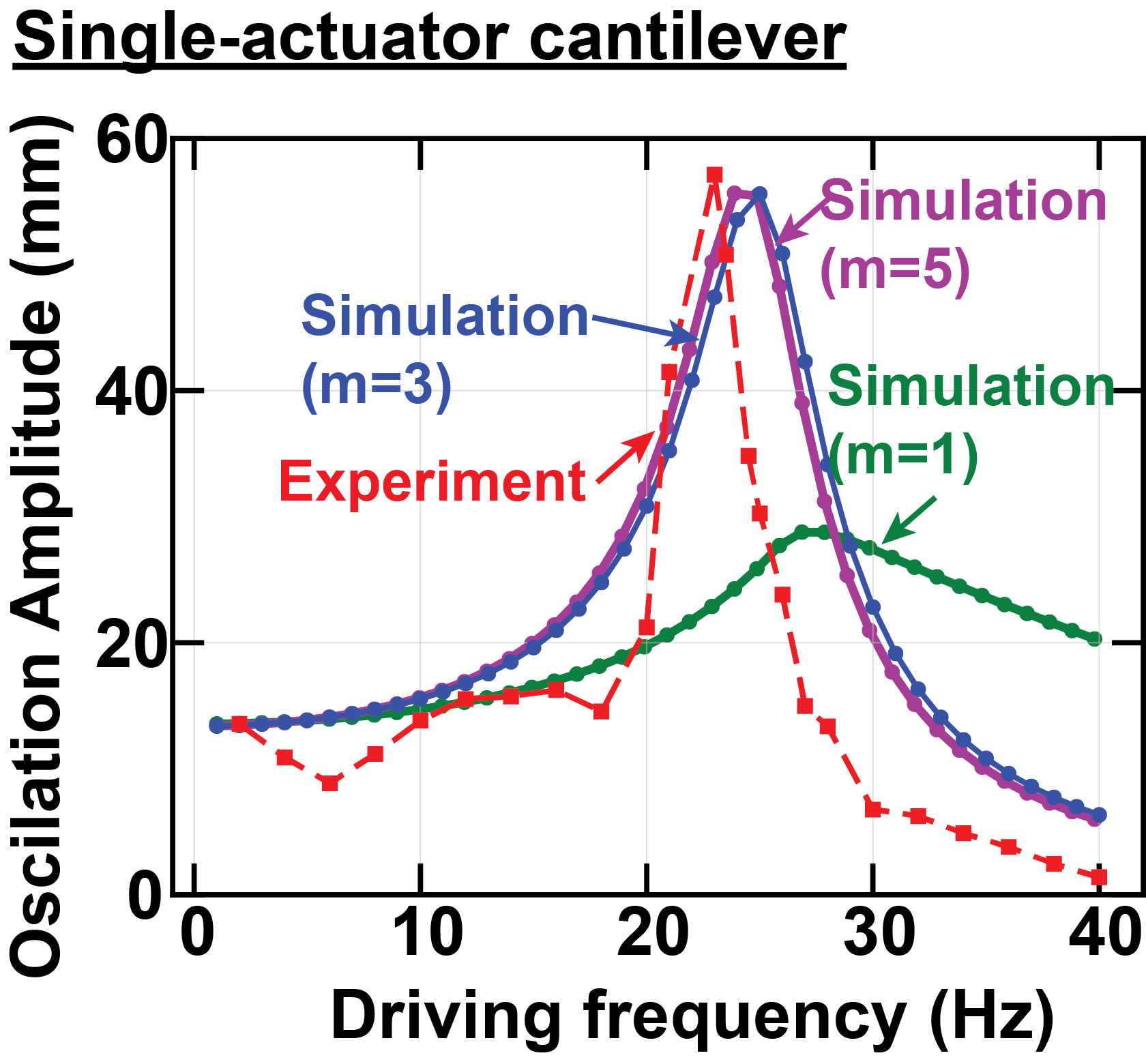
Single-actuator cantilever frequency response
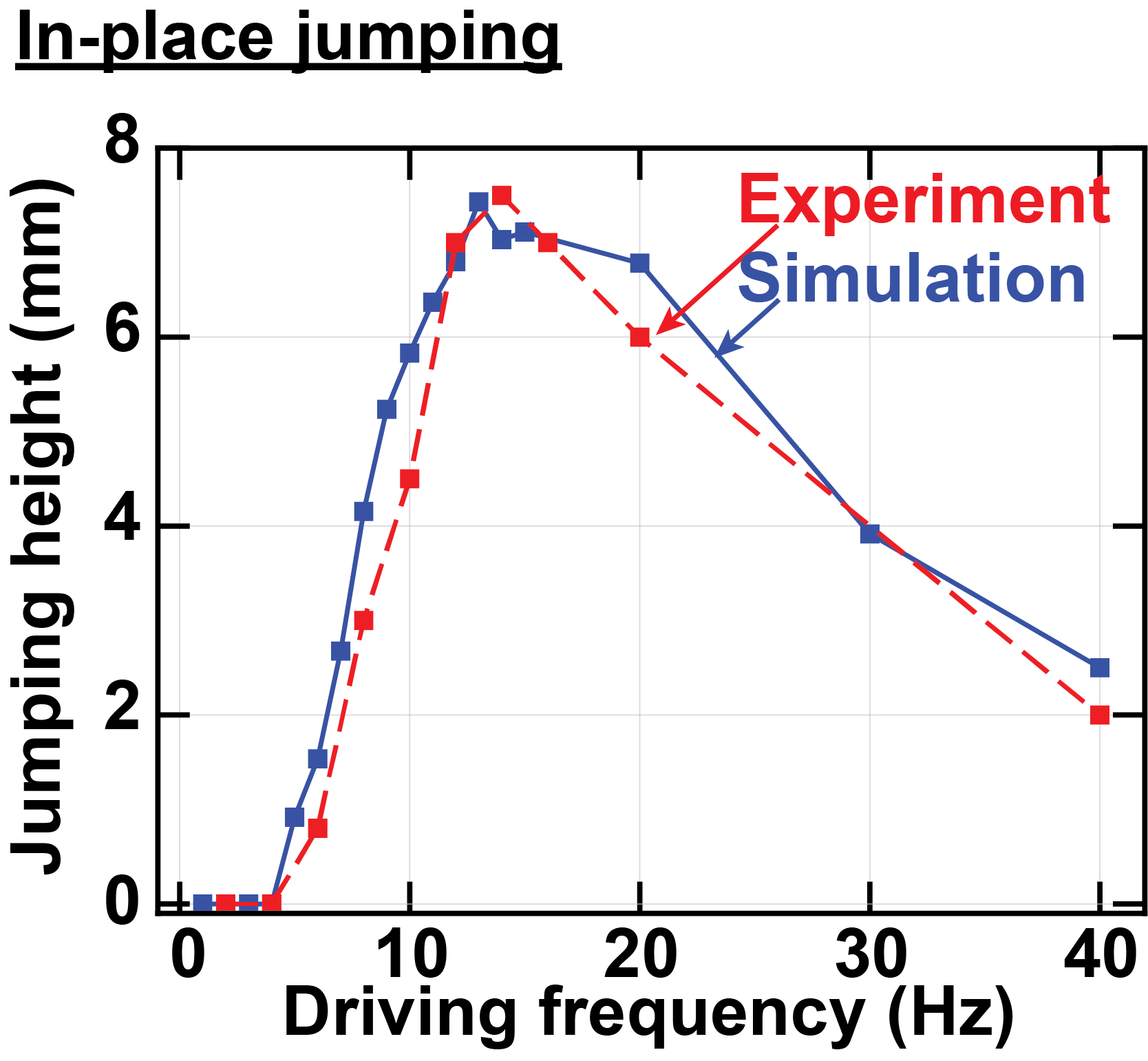
Jumping height dependency on frequency
Paper
Latest version (Feb 28, 2022): arXiv:2202.13521 [cs.RO].
To appear at the 2022 IEEE International Conference on Robotics and Automation (ICRA)
Code
Code is available on Github. Includes:
• Simulation environments (SFERS with PyBullet).
• Training/testing code (with Python).
• Models and parameters.
Bibtex
doi = {10.48550/ARXIV.2202.13521},
url = {https://arxiv.org/abs/2202.13521},
author = {Zheng, Zhiwu and Kumar, Prakhar and Chen, Yenan and Cheng, Hsin and Wagner, Sigurd and Chen, Minjie and Verma, Naveen and Sturm, James C.},
keywords = {Robotics (cs.RO), Systems and Control (eess.SY), FOS: Computer and information sciences, FOS: Computer and information sciences, FOS: Electrical engineering, electronic engineering, information engineering, FOS: Electrical engineering, electronic engineering, information engineering},
title = {Scalable Simulation and Demonstration of Jumping Piezoelectric 2-D Soft Robots},
publisher = {arXiv},
year = {2022},
copyright = {arXiv.org perpetual, non-exclusive license}
}
Team


Prakhar Kumar

Yenan Chen

Hsin Cheng
Sigurd Wagner


Summary Video
Link to the video
Acknowledgements
This work was supported by the Semiconductor Research Corporation (SRC), DARPA, Princeton Program in Plasma Science and Technology, and Princeton University.